Skill-based Robot Programming in Mixed Reality with Ad-hoc Validation Using a Force-enabled Digital Twin
 (opens in new tab)
(opens in new tab)
Venue. ICRA (2023)
Materials.
DOI(opens in new tab)
PDF(opens in new tab)
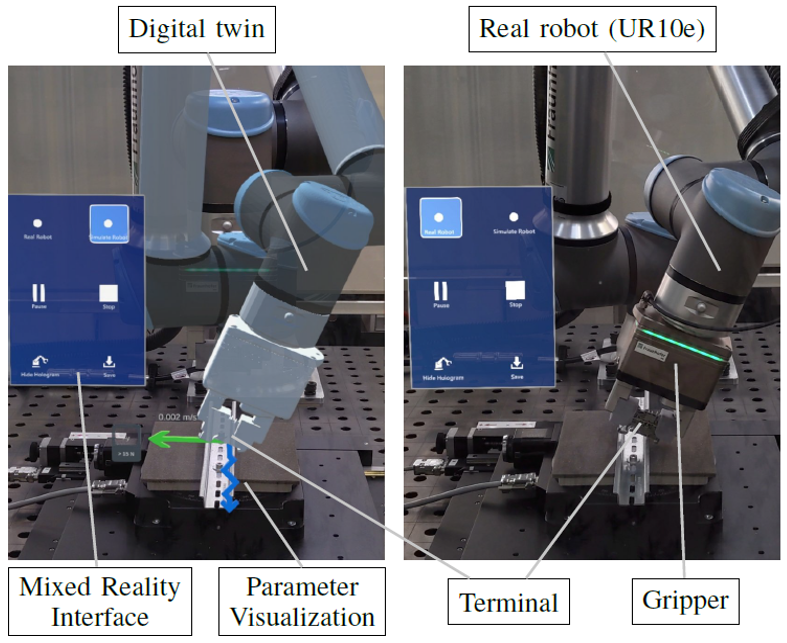
Abstract. Skill-based programming has proven to be advantageous for assembly tasks, but still requires expert knowledge, especially for force-controlled applications. However, it is error-prone due to the multitude of parameters, e.g. different coordinate frames and either position-, velocity- or force-controlled motions on the axes of a frame. We propose a mixed reality based solution, which systematically visualizes the geometric constraints of advanced high-level skills directly in the real-world robotic environment and provides a user interface to create applications efficiently and safely in mixed reality. Therefore, state-machine information is also visualized, and a holographic digital twin allows the user to ad-hoc validate the program via force-enabled simulation. The approach is evaluated on a top hat rail mounting task, proving the capability of the system to handle advanced assembly programming tasks efficiently and tangibly.
Link to this page: