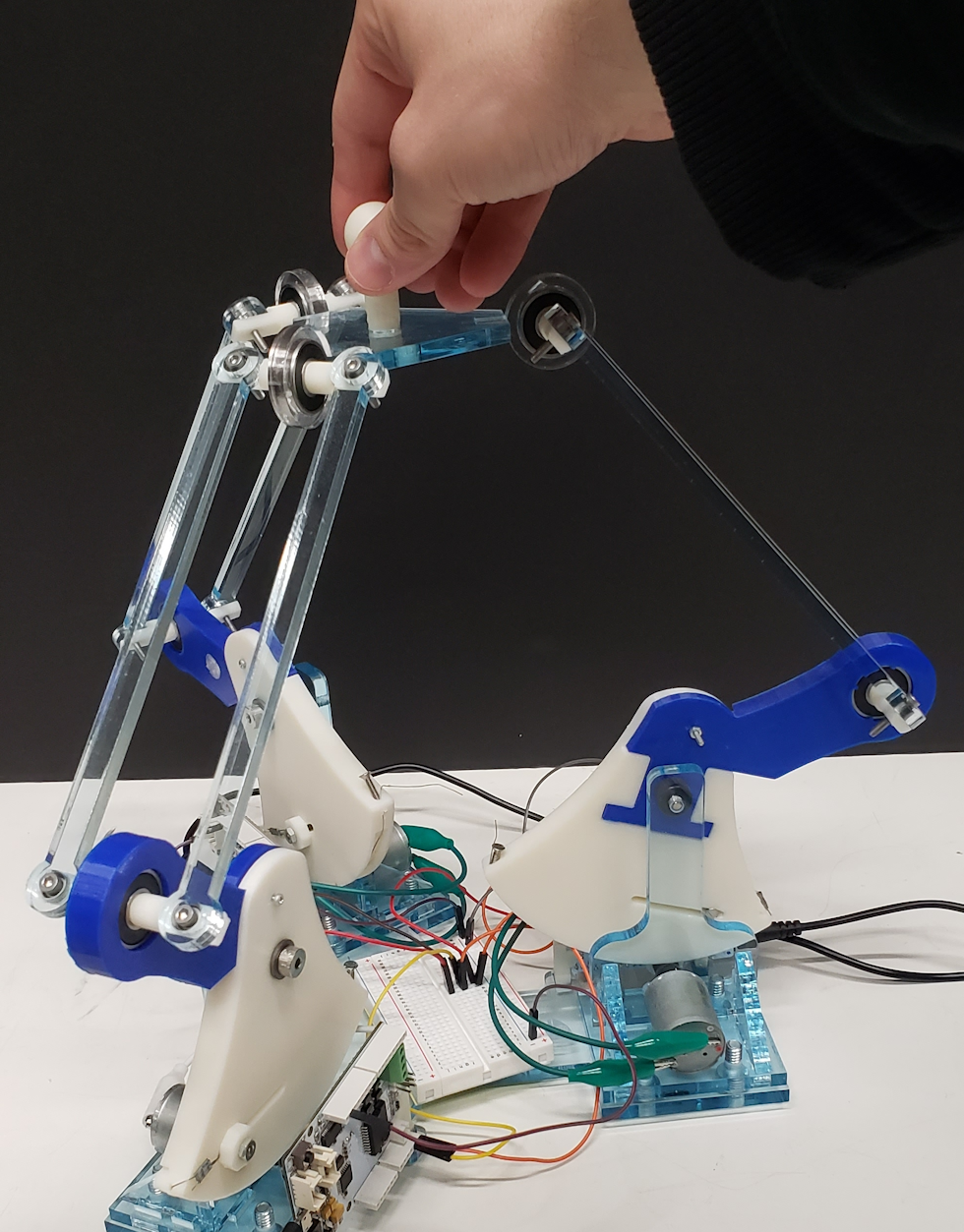
3D Hapkit: A Low-Cost, Open-Source, 3-DOF Haptic Device Based on the Delta Parallel Mechanism
 (opens in new tab)
(opens in new tab)
Venue. World Haptics (2023)
Materials.
PDF(opens in new tab)
Abstract. We present our work on an open-source, low-cost, 3-Degree Of Freedom (3-DOF) haptic device for use in haptic education. The device is based on three open-source 1-DOF haptic devices in a delta configuration and can be produced using commonly available rapid prototyping methodologies such as 3D printing and laser cutting. We also demonstrate a simple interaction with a virtual environment.
Link to this page: