An Exploratory Expert-Study for Multi-Type Haptic Feedback for Automotive Virtual Reality Tasks
 (opens in new tab)
(opens in new tab)
Venue. TVCG (2024)
Materials.
DOI(opens in new tab)
PDF(opens in new tab)
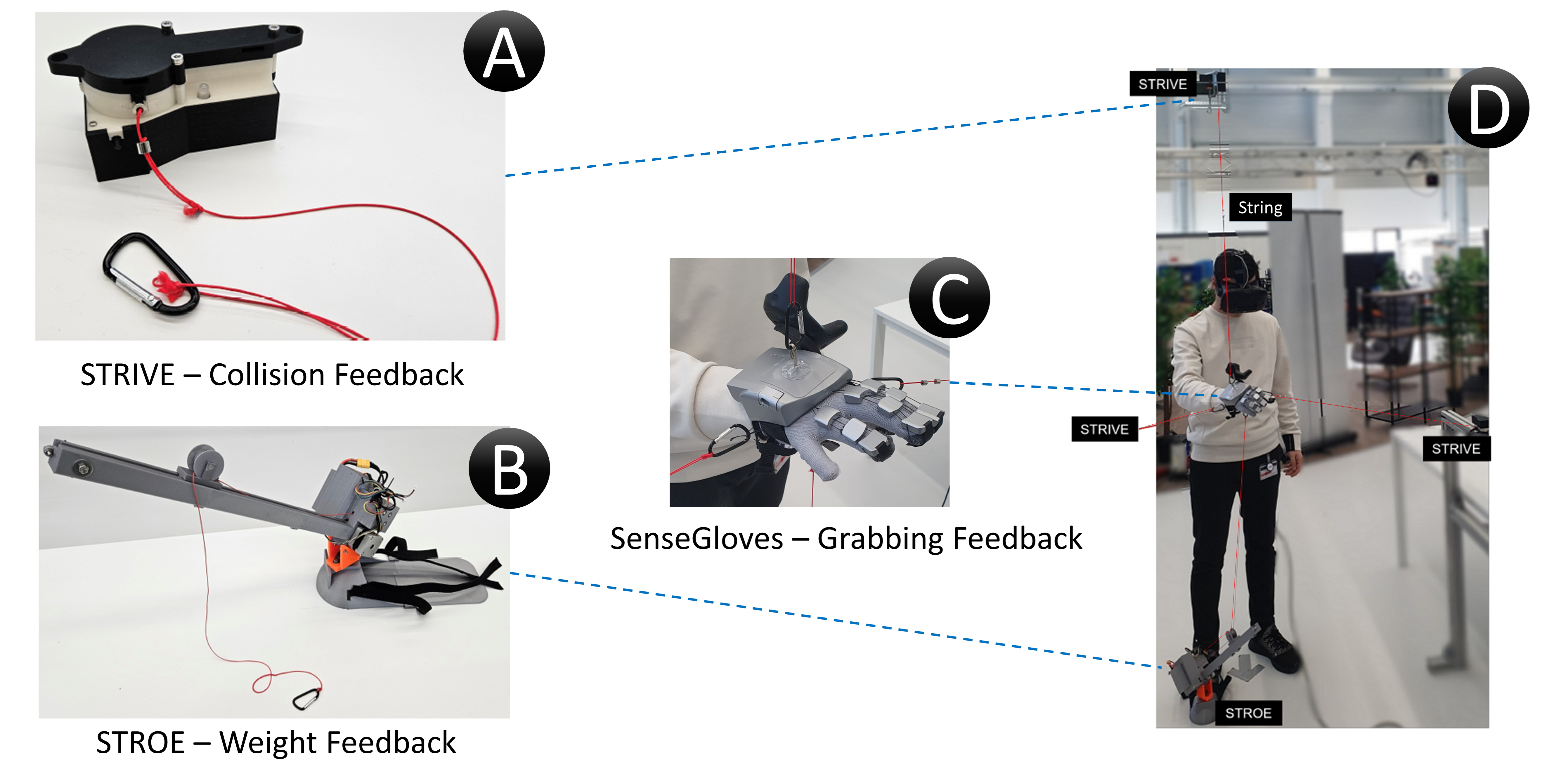
Abstract. Previous research has shown that integrating haptic feedback can improve immersion and realism in automotive VR applications. However, current haptic feedback approaches primarily focus on a single feedback type. This means users must switch between devices to experience haptic stimuli for different feedback types, such as grabbing, collision, or weight simulation. This restriction limits the ability to simulate haptics realistically for complex tasks such as maintenance. To address this issue, we evaluated existing feedback devices based on our requirements analysis to determine which devices are most suitable for simulating these three feedback types. Since no suitable haptic feedback system can simulate all three feedback types simultaneously, we evaluated which devices can be combined. Based on that, we devised a new multi-type haptic feedback system combining three haptic feedback devices. We evaluated the system with different feedback-type combinations through a qualitative expert study involving twelve automotive VR experts. The results showed that combining weight and collision feedback yielded the best and most realistic experience. The study also highlighted technical limitations in current grabbing devices. Our findings provide insights into the effectiveness of haptic device combinations and practical boundaries for automotive virtual reality tasks.
Link to this page: