Rendering Forces With a Modular Cable System, Motors, and Brakes
 (opens in new tab)
(opens in new tab)
Venue. TBP (2026)
Materials.
DOI(opens in new tab)
PDF(opens in new tab)
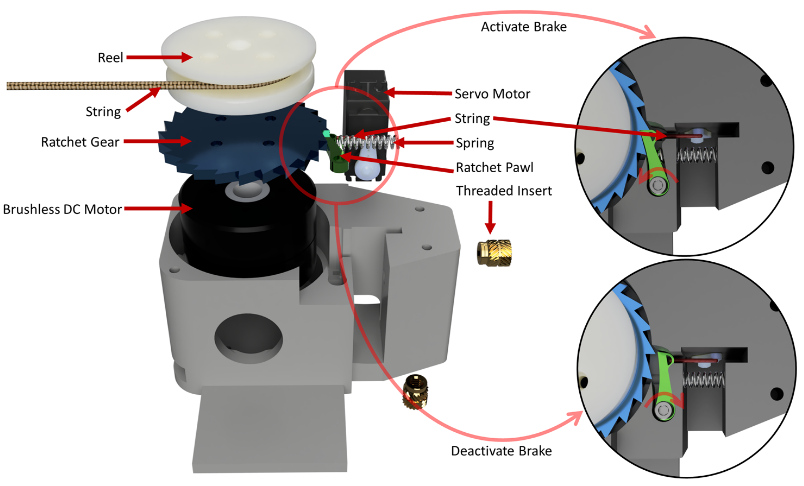
Abstract. We describe the hardware design, force-rendering approach, and evaluation of a new reconfigurable haptic interface consisting of a network of hybrid motor-brake actuation modules that apply forces via cables. Each module contains both a motor and a brake, enabling it to smoothly render active forces up to 6 N using its motor and collision forces up to 186 N using its passive one-way brake. The modular design, meanwhile, allows the system to deliver rich haptic feedback in a flexible number of DoF and widely ranging configurations.
Link to this page: