Exploring the Use of Augmented Reality for Multi-human-robot Collaboration with Industry Users in Timber Construction
 (opens in new tab)
(opens in new tab)
Venue. CHI-EA (2025)
Materials.
DOI(opens in new tab)
PDF(opens in new tab)
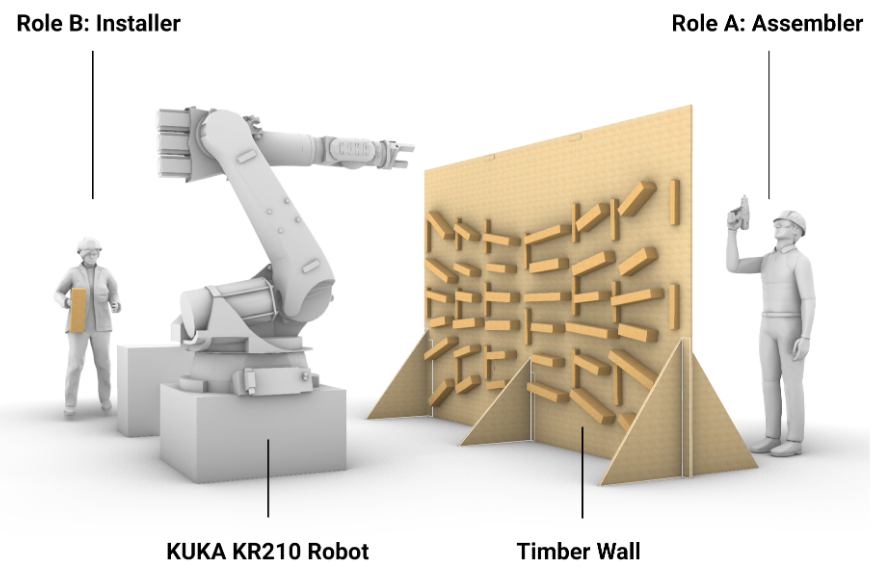
Abstract. As robots are introduced into construction environments, situations may arise where construction workers without programming expertise need to interact with robotic operations to ensure smooth and successful task execution. We designed a head-mounted augmented reality (AR) system that allowed control of the robot’s tasks and motions during human-robot collaboration (HRC) in timber assembly tasks. To explore workers’ feedback and attitudes towards HRC with this system, we conducted a user study with 10 carpenters. The workers collaborated in pairs with a heavy-payload industrial robot to construct a 2 x 3 m timber panel. The study contributes an evaluation of multi-human-robot collaboration along with qualitative feedback from the workers. Exploratory data analysis revealed the influence of asymmetrical user roles in multi-user collaborative construction, providing research directions for future work.
Link to this page: